
Bonjour,
j’ai toujours beaucoup de questions concernant le protocole des mesures de servormances. Voici donc quelques précisions. Veuillez également noter que le programme est livré avec une aide qui délivre des précisions sur des fonctions cachées. Pour utiliser pleinement le programme, il faut consulter ce document !
Nous mesurons un nombre de paramètre assez important. Avec la nouvelle version 3.1, toutes les mesures sont maintenant exploitées et visualisable dans le programme. Voici le descriptif de tout ce qui est mémorisé :
- L’alimentation: 5 et 6 volts ou 6 et 8 volts pour les high-voltage.
- Le couple maximum : il correspond au dernier point où nous avons pu faire des mesures complètes de vitesse, consommation et précision. Au-delà le servo décroche ou son défaut de positionnement est supérieur à 5°. Donc nous publions un couple REELLEMENT UTILISABLE et constaté sur le servo !
- La vitesse au couple max : elle correspond à une mesure sur le bras du servo lancé sur 60 degrés.
- Le temps de positionnement :
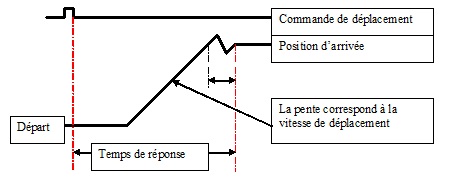
Nous mesurons le temps mis par le servo pour changer de position et confirmer la position d’arrivée. Il faut savoir que certains servos oscillent très longtemps avant de trouver leur position, surtout quand on les survolte ce qui donne un temps de positionnement bien supérieur à la vitesse. Dans l’application, ce temps est exprimé en pourcentage de la vitesse sur 60°. Nous donnons comme résultat une moyenne sur tous nos points de mesure (généralement une vingtaine). Par exemple, un temps de positionnement de 0.45 sec pour une vitesse de 0.30 sec sur 60° donnera un résultat de 50%. Il est tout à fait possible d’avoir des résultats dépassant 100%
- La consommation au couple maximum : c’est le courant relevé lorsque le servo atteint une vitesse de déplacement régulière. Ce n’est pas la moyenne pendant tout le déplacement, ni la valeur maximum du départ.
- Le courant maximal : C’est le courant consommé au moment où le moteur démarre et on peut le considérer comme la consommation maximale du servo (Ce courant est indépendant de la charge appliquée). Cette référence permet d’identifier, lorsque nous progressons dans les couples, que nous nous approchons des limites électriques du servo. Dans bien des cas, des limites liées soit à l’électronique de commande, soit de nature mécanique limitent le couple maximum et Il est courant de relever des valeurs de l’ordre de 1000mA, et maintenant pour certains servos plus de 2000 mA. Ceci donne à réfléchir quand au choix des AQs et de la connectique.
- La flèche au couple maximum : Elle caractérise la souplesse du servo sous charge. Pour la mesurer, nous immobilisons le servo à une position donnée et nous appliquons la charge correspondante. La mesure correspond à la déviation en degrés du bras de servo par rapport à la position à vide. Elle traduit le jeu sur l’axe de sortie, le jeu dans les pignons mais aussi la souplesse du boîtier et la faiblesse du moteur à supporter le couple imposé
- Le neutre : c’est une valeur moyenne sur toutes nos mesures de la précision du retour au neutre, exprimée en degrés.
- nouveau! Le test de déplacement 1° ou 2 ° : il caractérise la capacité du servo à réagir à de petites sollicitations. Pour chacun des couples testés, nous parcourons l’ensemble du débattement du servo par saut commandé de 1° ou 2° . Le test est considéré comme OK lorsque nous relevons moins de 2 erreurs de positions sur la plage de débattement, excepté les butées: exple sur la plage -50 / +50°, une erreur de positionnement à +12° et -25° donne un test échoué, une erreur sur la limite à 50° ou 49° n’est pas considérée comme significative. Le résultat que nous communiquons est la moyenne de nos tests sur tous nos points de mesure. Pour fixer les idées, seuls les servos haut de gamme réussissent le test de 1° sur plus de 80 % de leur débattement. Un servo mauvais au test de 2° sera très imprécis pour réagir au trim. Donc à ne pas mettre sur une gouverne demandant de la précision comme une profondeur.
Avec tout ceci, une dernière précision : quels sont les paramètres qui permettent de vérifier que nous sommes au couple maximum admissible par un servo ? Dans l’ordre décroissant d’importance :
- Un très bon indicateur est le respect du neutre. Cette mesure reste à peu près constante sur toute la plage d’utilisation du servo (de l’ordre de 0.7 à 1.3 degrés) et décroche d’un coup lorsque le servo est trop sollicité (typiquement plus de 5 degrés).
- La vitesse du servo, lorsque celle-ci dépasse 0.50 secondes pour 60 degrés, nous ne sommes plus dans un comportement nominal du servo et nous stoppons les mesures.
- Sur certains servos très rapides, nos constatons une vitesse toujours correcte mais un temps de positionnement mauvais (exemple vitesse = 0.20 sec et temps de positionnement = 0.85 sec) Donc un servo qui oscille énormément avant de trouver sa position cible. C’et pour nous aussi un critère d’arrêt des tests.
- Et au final, si la consommation sous charge dépasse 80% de la consommation maximale, nous arrêtons par prudence
Bonjour,
La dernière version de votre appareil de mesure compatible 8 V complète montée et testée avec capteur angulaire est-elle disponible à la vente ? Prix?
Merci par avance, et bravo pour les précieuses informations que vous diffusez!
Cordialement.
Bonjour Henry,
C’est Patrick Cesarato qui a conçu cette boite, contacte le directement.
Bonsoir,
Je viens de recevoir mes DES 281 BB MG Graupner
Si ça vous tente je peux vous en envoyer un pour la batterie de tests.
Il faut juste qu’il me revienne rapidement car le 1er mai est bientôt là et je ne suis pas bien rapide à monter 4 bouts de machins dans une aile… 🙂